

摘要:基于Delta并联机械手创新采用了悬挂式机构,设计成为大范围抓取机载平台。经过卷积算法设计两个算子提取梯度图像,对图像梯度方向停止梯度大小的挪动并停止像素叠加,可以疾速收敛至待辨认球心。进步了零碎对球的辨认准确度和零碎鲁棒性。神经网络拥有良好的非线性迫近特性和自顺应、自学习才能,应用机器学习神经网络的训练,进而可完成对场景目的的精确辨认和抓取义务,构建成一个智能化的机械手抓平台。
关键词:并联机械手;神经网络;梯度位移;抓取
1. 项目简介
目前并联机械手因其功能高、本钱低、负重比大、惯量低、静态功能好、运动精度初等优点,开展迅速。众多研讨者在并联机械手机构上配以计算机视觉零碎,试图到达对目的物体的自动辨认、跟踪与抓放。但目前基于并联机械手的图像处置算法仅能满足目的辨认的根本效果,缺乏精度及可移植性。
神经网络因其良好的非线性迫近特性和自顺应、自学习才能而成为机器人视觉伺服的研讨热点。应用机器学习中的相关统计学习办法提取目的的特征信息并完成对神经网络的训练,进而完成对场景目的的精确辨认和抓取义务,构建一个智能化的机械手抓取平台成为能够。
本项目旨在设计完成精确高效的并联机械手,并在此根底上构建智能图像处置平台,采用机器学习算法结合神经网络的办法用于完成复杂物体的自动辨认、跟踪与抓放,完成并联机械手的智能化。其中,应用神经网络和机器学习相结合的办法,能无效地提取特征并加权,同时使误差降到最低,具有良好的强健性,能满足安装的高精度和多种环境的任务需求。
3. 项目方案
基于并联机械手的智能抓取平台次要应用图像处置和机器学习的相关 实际,完成对场景中被抓取目的的特征提取、特征学习和目的姿势断定,然后驱动机械手臂抓取特定的目的。在项目研制进程中,需求重点处理以下两个方面的成绩:机械臂设计和基于图像处置的目的抓取。其中,在机械臂设计方面,需求完成机械手的建模和受力剖析任务,同时思索到机械手可以顺应不同的使用场景,需求对机械臂的抓取空间停止合理规划和优化。在目的抓取进程中,需求思索目的的特征信息、神经网络模型的构建和训练,以及如何控制机械臂完成精确、疾速的目的抓取义务。经过设计合理的技术道路和研讨方案,最终开收回一套可以疾速、精确且具有智能性的机器人抓取平台。
3.1机械局部
机械局部树立在Delta机构并联机械手根底之上,同时对机械安装加以改良以扩展机械手的任务范围。运用SolidWorks对全体机械构造停止建模,并经过Ansys Workbench对受力状况、疲劳度等停止剖析,确认最优方案。
舵角的计算:由于本项目采用的是是三自在度Delta并联机械手,关于三自在度 Delta 并联机械手而言,其运动学逆解普通都比拟容易,通常可以直接用一个解析表达式来描绘这种运动学逆解关系。

完成目的的地位停止定位之后,基于地位的视觉定位依据目的绝对于机械臂的位姿和运动形态,可应用上式可推导出在目的坐标下三个舵机的实际转角,给出机械臂在柱坐标系内的运动指令并发送给下位机。应用STM32输出捕捉接纳信号,输入PWM波控制机械臂抓取目的。
3.2图像处置局部
在应用机器学习和神经网络手腕构建智能抓取平台的进程中,详细的技术道路如图1所示。
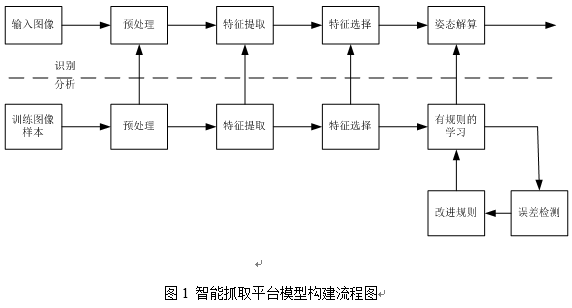
该进程由上半局部的辨认和下半局部的剖析构成:辨认局部完成对输出图像的预处置、特征提取、特征选择和姿势解算;剖析局部完成对训练样本的预处置、特征提取、特征选择和规则学习,最终构建一个具有智能性的神经网络模型。图框右下角局部则为自顺应处置局部,即经过训练样本给出断定规则,再对原训练样本停止顺次检测,判别有无误差,进而不时改良判别规则,不断到达要求完毕。
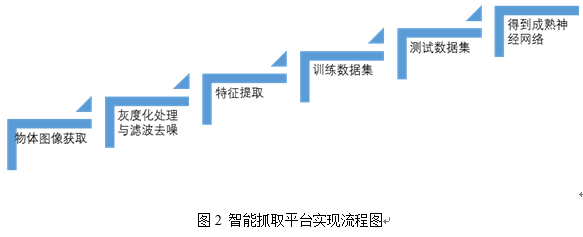
为了完成机器人根据视觉信息对三维空间目的物体的抓取,需求从摄像机获取的二维图像中提取出目的的特征信息。机器人视觉零碎的关键技术是对目的实时、精确的提取,而目的提取的本质是图像联系。本局部以并联机械手为平台,对采集的图像停止相关处置,提取出目的物体的有用特征。然后,采用神经网络训练测试样本,完成了从图像空间到摄像机空间的坐标转换,完成了机器人依据视觉信息对三维空间目的的定位。机器学习神经网络的设计完成可分为 3个阶段,样本图像根本处置、神经网络训练和测试优化。图像的根本处置进程包括图像获取、灰值化与滤波、图像联系和图像加强等。本局部的根本流程如图2所示:

(责编:温静、赵光霞)





