
孙丰,王华东,杲绍风,姜良银
ABB机器人弧焊使用中心
1 引言
随着汽车业、军工及重工等行业的飞速开展,这些行业中的三维钣金零部件和特殊型材的切割加工出现小批量化、多样化、高精度化的趋向。工业机器人和光纤激光所组成的机器人激光切割零碎一方面具有工业机器人的特点,可以自在、灵敏的完成各种复杂三维曲线加工轨迹,另一方面采用柔韧性好、可以远间隔传输激光光纤作为传输介质,不会对机器人的运动途径发生限制造用。绝对于传统的加工办法,机器人激光切割零碎在满足准确性要求的同时,能很好地进步整个激光切割零碎的柔性,占用更少的空间,具有更高的经济性和竞争力。
与点焊、搬运等运动控制所不同的是,激光切割是基于延续工艺形态下的运动控制,除了要求机器人具有较高的运动点的精度和反复定位精度外,还对机器人运动的轨迹即机器人的直线和圆弧轨迹插补的精度提出了很高的要求。激光切割中的倒角切割和小圆切割的精度和波动功能够很好的权衡机器人的运动控制才能。ABB应用本身弱小的研发实力开发了一系列的高端技术,来满足市场的需求。所开发的True Move和Quick Move技术可以很好地处理高速状况下倒角切割的精度成绩,Advanced Shape Tuning和Wrist Move技术则可以很好地处理小圆切割的精度成绩。同时,结合ABB的离线编程仿真软件Robot Studio和良好的人机交互接口Flexpendant及人机界面,使得整个激光切割零碎在满足客户技术要求的前提下,容易操作及管理。
2.1 True Move和Quick Move技术
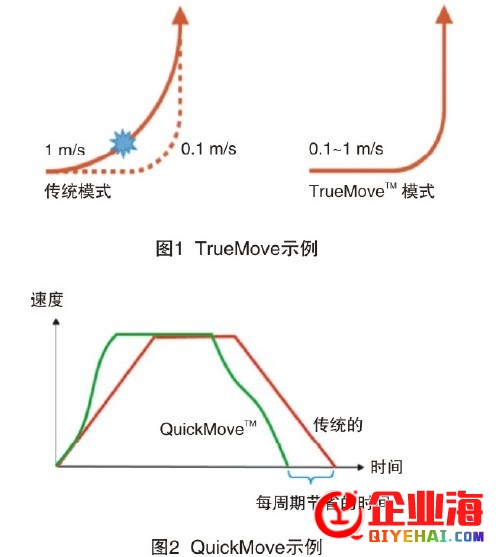
如图1所示,传统机器人在低速状况下实践途径与编程途径相吻合,但是在高速状况下做转弯运动时,实践途径就会偏离编程途径。基于初级前馈伺服控制技术的True Move极大的提升了运动控制精度,处理了机器人在高速状况下实践运动途径偏离编程途径的成绩,真正完成了所编即所得。
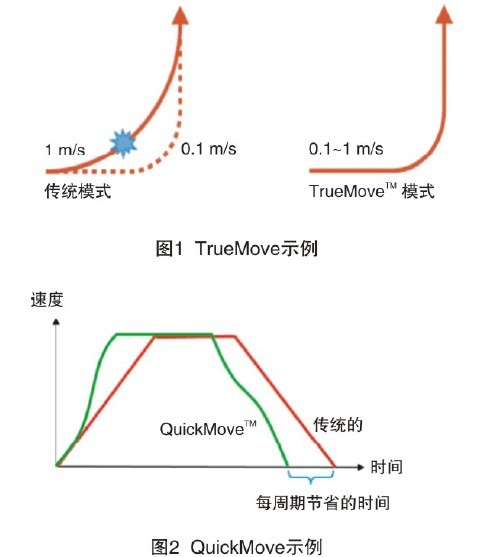
如图2所示,传统机器人在速度上升和下降的进程中减速度坚持不变,相应的完成一个举措节拍的工夫也较长。基于初级简单来说,创业有四步:一创意、二技术、三产品、四市场。对于停留在‘创意’阶段的团队,你们的难点不在于找钱,而在于找人。”结合自身微软背景及创业经验。动力模型控制技术的Quick Move可以准确控制机器人的加加速度和波动速度,经过使机器人恣意时辰的减速度最大化来增加举措节拍工夫。
2.2 Advanced Shape Tuning和Wrist Move技术
ABB开发的Advanced Shape Tuning软件可以补偿机器人轴摩擦力功用,对机器人在走复杂的三维切割途径时的巨大颤动、共振等状况做及时、准确的补偿。这些功用包括在机器人的选项中,使用时客户只需求调用相应的功用模块,机器人就能依据指令反复走所编程的途径并且自动取得各个轴的摩擦参数。
Wrist Move是使机器人在切割时1、2、3轴不动,只要机器人运动末端4、5、6轴停止运动,这就防止了1、2、3轴运动时轴摩擦力对小圆切割途径形成的不良影响。
2.3 离线编程仿真和人机交互接口
Robot Studio是ABB开发的离线编程与仿真软件,可在电脑上完成简直一切的机器人编程与仿真。如图3所示,经过Robot Studio可以完成非常逼真的模仿,并且所用的均为实践运用的机器人顺序和配置文件。配合ABB Absolute Accuracy校正零碎,可以使模仿后果到达很高的精度。Robot Studio还可方便地导入IGES、STEP、CATIA等主流CAD格式数据,然后根据这些准确的数据编制机器人顺序。运用软件中的AutoPath功用,仅在数分钟之内便可自动生成跟踪加工曲线所需求的机器人地位(途径),很好地处理了激光切割中复杂切割曲线无法经过示教发生的成绩,大小节约了编程工夫。

3 相关使用案例
ABB 2600型机器人所构建的激光切割零碎很好地表现了ABB机器人在激光切割使用范畴相关的技术,上面以此为使用案例停止引见。
3.1 零碎组成
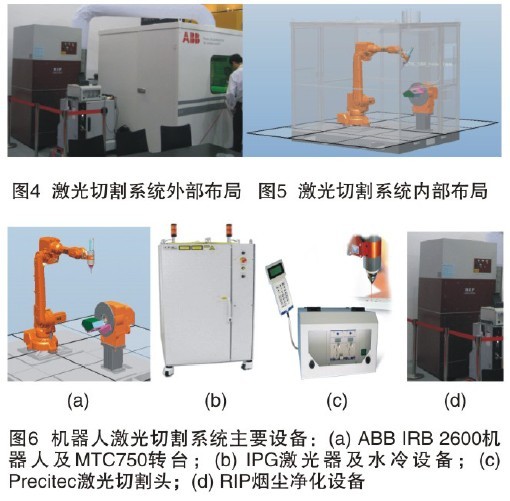
机器人激光切割零碎内部规划和外部规划辨别如图4和图5所示。整个零碎次要由ABB IRB 2600机器人及MTC750转台(图6a)、IPG激光器及水冷设备(图6b)、Precitec激光切割头(图6c)、RIP烟尘污染设备组成(图6d)。
1) IRB 2600机器人具有同类产品中最高的定位精度及减速度,可确保高产量及低废品率从而进步消费率。所切割的钣金件安放在MTC750转台上。使用ABB机器人的MultiMove功用,机器人和转台可以协同运动,且能到达很高的运动精度,从而保证工件的激光切割精度。
2) 激光发作器及水冷设备选用IPG公司的,型号为YLS-1000,激光最大功率为1000 W。激光采用光纤传输,经聚焦后作为切割热源,使工件被照射处的资料迅速熔化,同时用与激光束同轴的高速气流来吹除熔融物质,以构成空泛,随着光束与资料沿一定轨迹作绝对运动,从而使孔洞延续构成一定外形的切缝,完成对工件的激光切割。
3) 激光切割头选用Precitec公司YRC型切割头,该切割头除了具有用来聚焦激光的聚焦透镜以及相应的光纤插口、水冷和气体衔接口外,还具有高度传感器,可以停止防碰撞维护和自动浮动调焦。该功用可以无效地进步激光切割质量。
#p#分页标题#e#
除此之外,为了避免激光切割进程中所发生的激光辐射和烟尘净化,2600机器人和MTC750转台都放置在任务房内,整个加工进程在任务房内停止,用于察看切割进程和上下料的窗口均采用特制的激光防护玻璃,发生的烟尘在加工进程中应用RIP污染设备及时抽走,从而保证了整个激光切割零碎的平安性。
1) 采用ABB离线编程与仿真技术,明显延长了整个零碎的编程和调试的工夫,进步了全体消费效率。大局部机器人编程均可在Robot Studio环境下完成。首先将相关的机器人、转台模型,以及Precitec激光切割头、所加工工件的三维模型导入到Robot Studio中,使用AutoPath功用依据工件外形模型自动生成编程途径,必要时停止途径优化和碰撞检测。然后经过虚拟运转机器人顺序,在Robot Studio虚拟三维环境中可以直观的察看机器人的运动途径,以便停止修正和调整。最初将确定好的机器人顺序下载至实践的机器人控制器中,停止大批的实践调试即可完成整个零碎的机器人编程。实践消费中使用该技术,无论是投产还是换线,机器人编程均可提早预备就绪,大大降低了在消费现场调试和停机中缀消费的工夫,进步了消费效率,扩展了机器人零碎投资报答。
2) 采用ABB机器人True Move和Quick Move技术,最大水平地保证了机器人的运动精度和速度。同时应用Advanced Shape Tuning对2600机器人6个轴的摩擦力停止补偿,进步了机器人本身运动精度,最大水平地降低了机器人运动误差对激光切割质量的不良影响。
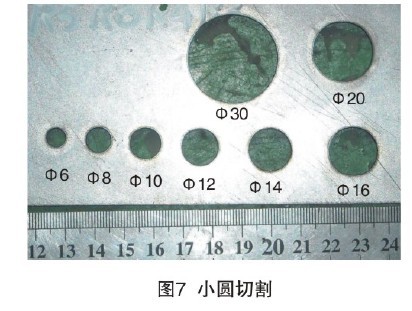
3) 高质量的激光切割效果除了要求机器人本身应具有很高的运动轨迹精度外,良好的切割工艺也是必备要素。切割工艺触及到切割速度和减速度、激光功率、焦点地位、吹气量等多种要素的综合调理。图7为工艺调整后切割出的小圆,直径辨别为&Phi6,&Phi8,&Phi10,&Phi12,&Phi14,&Phi16,&Phi20,&Phi30,可以看出切割后的小圆热变形很小,边缘光亮,无分明缺陷。经测量,小圆的轨迹误差约为0.1~0.25 mm,阐明基于ABB机器人的激光切割零碎具有很高的运动精度和切割精度。
ABB机器人激光切割零碎既具无机器人运动灵敏,柔性高的特点,又具有激光切割的切割速度快、质量好、切缝窄等优点,很好地满足了古代制造业开展的要求;同时借助ABB机器人在激光切割范畴的相关技术,不只在技术上可以满足复杂三维切割的要求,有助于进步工业产品的质量程度,同时降低了消费本钱,可以给企业带来宏大的经济效益。
AI已经渗透到了生活中的方方面面。在智能交通领域,人工智能技术也正在发挥作用。
孙丰,ABB机器人弧焊使用中心部门经理,royal-feng.sun @cn.abb.com;王华东,部门副经理;杲绍风,测试组经理;姜良银,工程师。





